10 Minute
Roverul a continuat să meargă. Singur, într-un anumit sens. Timp de două zile din decembrie 2025, Perseverance al NASA a traversat 456 de metri prin teren marțian folosind puncte de traseu (waypoints) generate de inteligență artificială, fără control uman direct la roată. Acea distanță, aproape o sută și cincizeci de yarzi de fotbal american, este modestă pentru o maşină, dar semnificativă pentru un vehicul care operează după parcurgerea a zeci de milioane de kilometri prin spațiu gol şi cu un decalaj de comunicare între 12 și 25 de minute.
Ce s-a întâmplat pe Marte
Experimentul a combinat două tipuri de autonomie: planificare la sol şi conducere autonomă la bord. Echipele de la sol au folosit un sistem de inteligență artificială antrenat să analizeze imagini orbitale de înaltă rezoluție şi modele digitale de elevație (DEM), însărcinându-l să identifice pericole și să propună o rută. Lanțul rezultat de waypoints a fost uplink-uit către Perseverance, iar softul de autonavigație al roverului a gestionat condusul, capturând imagini noi şi ajustându-se în timp real.
Nu este prima dată când un rover pe Marte se conduce singur; Perseverance foloseşte deja navigația autonomă în mod obișnuit. Noutatea constă în pasul de planificare generat de AI. În loc ca operatorii umani de pe Pământ să marcheze obiective intermediare la intervale de circa 100 de metri, sistemul AI a evaluat fotografiile orbitale HiRISE și datele de elevație pentru a trasa un traseu continuu, care evită pericolele, și pe care Perseverance l-a putut urma pe distanțe mai lungi.
Acest pas de planificare automatizată scurtează ciclul operațional: în locul unor multiple tururi de analiză umană şi modificare a punctelor intermediare, algoritmul propune o rută coerentă, optimizată pentru siguranță și eficiență, luând în considerare atât riscurile evidente, cât şi preferințele științifice făcute de echipă (de exemplu, zone cu interes geologic crescut).
Cum a redus echipa riscul
Fiecare test în afara Pământului începe cu precauție. Înainte ca orice rută generată de AI să fie trimisă pe Marte, inginerii au rulat planul pe un geamăn terestru al roverului: Vehicle System Test Bed (VSTB) din Mars Yard al JPL. VSTB este un model de inginerie folosit pentru a reproduce probleme, valida software şi repeta proceduri noi într-un mediu controlat. JPL a construit geamăni similare şi pentru alte misiuni, inclusiv Curiosity.
Acest pas hardware-in-the-loop a oferit operatorilor încredere: AI-ul filtrase deja pericolele evidente — capcane de nisip, câmpuri de bolovani, roci de bază expuse şi promontorii stâncoase — şi marcase waypoints care se strecoară între ele. Odată ce acele waypoints au trecut testele la sol, Perseverance a preluat execuția pe Marte şi a parcurs cei 456 de metri (1.496 de picioare) pe durata a două zile, fără tele-operare umană directă.
Validarea a inclus atât rulări fizice pe VSTB, cât şi simulări extensive în software, folosind modele de mediu care reproduc iluminarea, textura solului, variațiile de relief şi comportamentul rovilor la nivel de suspensie şi tracțiune. Prin această abordare, echipa a putut cuantifica riscurile, estima marginea de siguranță şi ajusta parametrii AI înainte de uplink.
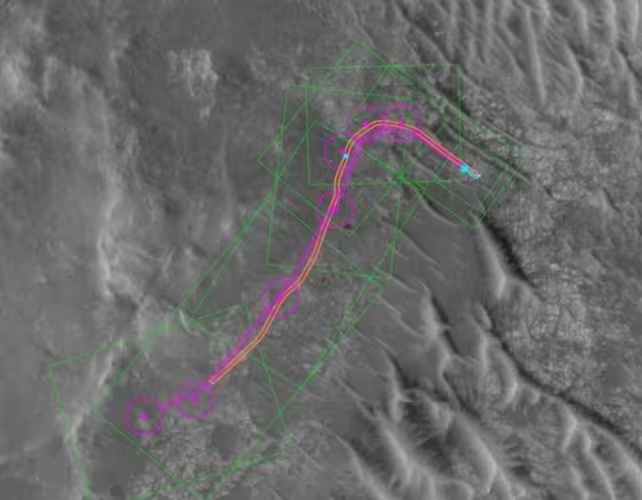
Această imagine orbitală adnotată arată ruta lui Perseverance în timpul celei de-a doua zile de condus autonom, pe 10 decembrie 2025. Linia magenta arată ruta planificată de AI, iar linia portocalie arată ruta efectivă urmată.
De ce contează acest test
Distanța este doar o parte din poveste. Progresul real constă în capacitatea de a scala explorarea în condițiile decalajelor temporale şi a capacității limitate a operatorilor. Semnalele către și de la Marte necesită minute pentru a călători. Această latență obligă echipele de misiune să pre-planifice deplasările și apoi să aibă încredere că roverul va urma instrucțiunile. Cu cât aceste deplasări sunt mai lungi și mai complexe, cu atât poate crește incertitudinea roverului privind poziția sa exactă — o problemă pe care inginerii o numesc deriva de localizare (localization drift).
Pentru a extinde deplasările de la câteva sute de metri la kilometri, un rover trebuie să se re-localizeze mai des, potrivind imagini la nivel de sol cu hărți orbitale și ajustând estimările de poziție. În prezent, această asociere între imagini la sol și vederile orbitale este în mare parte realizată sau revizuită de oameni. Inteligența artificială promite să accelereze procesul, învățând să potrivească fotografiile la sol cu mosaice orbitale mai rapid și mai robust, reducând astfel sarcina operatorilor și permițând traversări mai lungi și mai sigure.
Pe lângă escalarea distanței, beneficiile includ optimizarea traseelor pentru conservarea energiei, identificarea oportunităților științifice neplanificate, și reducerea frecvenței uplink-urilor necesare, ceea ce eliberează resurse de comunicație pentru alt tip de date (telemetrie, imagini științifice, mostre).
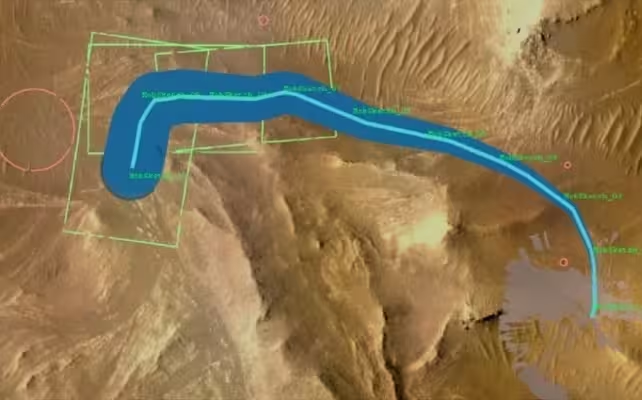
Albastrul din această imagine ilustrează cum incertitudinea roverului privind poziția sa pe suprafață crește pe măsură ce urmează un set de instrucțiuni.
Context științific și inginereasc
Navigația autonomă se sprijină pe trei piloni: percepție (identificarea pericolelor și a elementelor utile), localizare (cunoașterea poziției roverului) și planificare şi control (alegerea și urmarea unei căi sigure). AI generativă ajută în special la percepție și planificare, prin ingestia rapidă și interpretarea unor mari mosaice de imagini orbitale, apoi propunând rute care evită pericolele și favorizează terenul de interes științific.
Autonomia la bord a lui Perseverance adaugă apoi un strat secundar: pe măsură ce se deplasează, roverul captează imagini la sol și ia decizii la scară fină pentru a evita obstacole imediate — pietre, denivelări, suprafețe moi. Combinația dintre inteligența la sol (groundside) și cea la bord (onboard) creează un buclă de feedback care ar putea permite misiunilor viitoare să încerce secvențe de deplasare mai lungi cu mai puține uplink-uri.
Din punct de vedere tehnic, modelul AI folosit în demonstrație provine dintr-o arhitectură derivată din Claude de la Anthropic, integrată într-un flux de lucru inginereasc riguros. NASA pune accent pe validare atentă: fiecare rută sugerată a fost verificată pe geamănul din Mars Yard și testată în simulare înainte de a trimite comenzi prin spațiu interplanetar. Aceasta este progres deliberat şi incremental — nu un salt iresponsabil.
În plus, integrarea cu datele HiRISE (High Resolution Imaging Science Experiment) şi DEM-urile generate de cartografiere orbitală permite AI-ului să înțeleagă relieful la scară largă, iar algoritmii de planificare țin cont atât de costul energetic al traseului, cât și de obiectivele științifice. În practică, acest lucru înseamnă combinarea hărților de risc cu hărți de interes (ex.: unități sedimentare, structuri geologice expuse) pentru a genera rute care maximizează valoarea științifică per metru parcurs.
Unde conduce asta mai departe
Așteptați-vă ca AI să joace un rol tot mai important în misiunile viitoare. Există deja concepte pentru rovere capabile să lanseze roiuri (swarms) de drone sau drone-avioane pentru a cartografia teren dincolo de linia vizuală, cu sisteme la bord care coordonează multiple vehicule. Misiunea Dragonfly a NASA către Titan, un rotorcraft destinat să colecteze mostre și să exploreze o lume complexă de dimensiunea unei luni, plănuiește să folosească navigație autonomă și curare a datelor la bord pentru a gestiona observațiile în zbor între opriri științifice.
Inginerii NASA văd un viitor în care edge computing și modele AI curate (curated AI models) poartă judecata acumulată a echipelor de misiune în teren: sisteme inteligente care prioritizează ținte, marchează roci neobișnuite pentru cercetători, și leagă împreună traversări de mai multe zile păstrând riscul scăzut. Câștigul este atât o suprafață mai mare acoperită, cât și mai multă știință returnată pentru fiecare dolar investit în misiune.
Pe lângă rovere și drone, aceste tehnologii pot susține viitoare baze robotice autonome, operațiuni de recunoaștere pentru echipe umane și logistică complexă într-un mediu cu comunicare limitată. Adoptarea unei arhitecturi hibride — combinație de calcul la bord, modele AI curate la sol și validare fizică pe geamăni — va fi esențială pentru scalabilitate și siguranță.
Perspective de la experți
„Acest tip de demonstrație este următorul pas logic”, spune dr. Elena Marconi, inginer în robotică planetară cu decenii de experiență de teren. „Am învățat maşinile să vadă la scări diferite — de la orbită la camerele roverului — și acum le învățăm să planifice în moduri care imită prudența umană, dar operează cu viteza mașinii. Rezultatul este un multiplicator pentru explorare: deplasări mai inteligente și mai lungi care eliberează oamenii de sarcini repetitive și îi permit să se concentreze pe cele mai relevante descoperiri.”
Vandi Verma, robotist spațial de la JPL implicat în misiunea Perseverance, a subliniat că AI generativă arată potențial în eficientizarea percepției, localizării și planificării pentru condusul off-planet. Managerii de explorare de la NASA văd efortul ca pe construcția bazei tehnologice pentru o prezență umană și robotizată susținută dincolo de Pământ. Așa cum a sugerat Matt Wallace, manager al Exploration Systems Office la JPL, iluminarea drumului nostru către Lună și Marte va necesita sisteme inteligente care operează atât la sol, cât şi la marginea rețelei (edge).
Conducerea autonomă de 456 de metri a lui Perseverance, realizată în două zile, nu este nici o linie de sosire, nici un artificiu de PR. Este un progres măsurat în capacitate, validat pe geamăni inginerești şi proceduri conservatoare. Experimentul demonstrează nu numai că AI poate propune rute viabile plecând de la date orbitale, dar și că o integrare bine testată a autonomiei la sol și la bord poate extinde în siguranță raza de acțiune a unui rover între uplink-uri, marcând în același timp elemente științifice interesante pentru investigații ulterioare.
Fiecare metru pe o altă planetă contează. Cu fiecare kilometru autonom de succes, exploratorii noștri robotici ne cumpără mai mult timp pentru a gândi, planifica și face descoperiri care vor modela misiunile viitoare — și, în cele din urmă, oamenii care îi vor urma în sistemul solar.
Sursa: sciencealert
Lasă un Comentariu