8 Minute
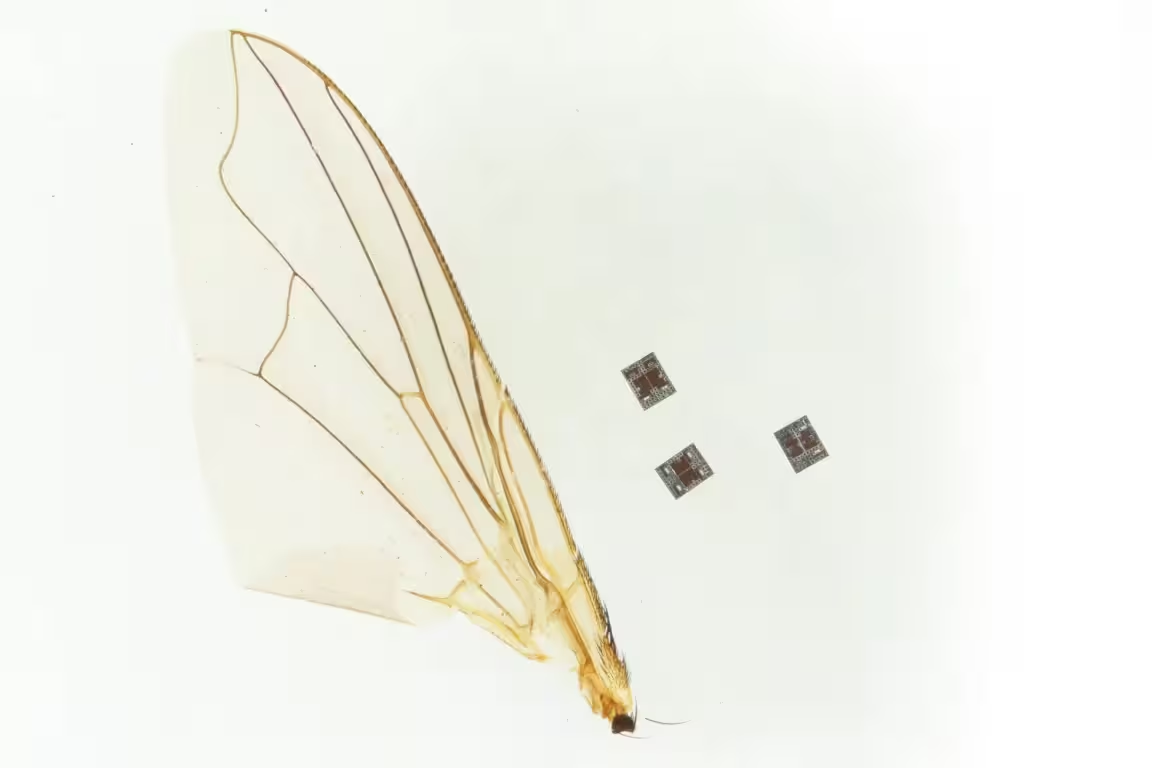
Cercetători de la Universitatea din Pennsylvania și Universitatea din Michigan au construit un microrobot sub-milimetru care integrează un calculator, senzori și un sistem de propulsie într-un dispozitiv mai mic decât un bob de sare. Studiul, publicat în revista Science și relatat de Washington Post, sugerează că acest micro-robot ar putea deschide calea pentru instrumente medicale viitoare capabile să funcționeze în interiorul corpului uman. Dezvoltarea pune în discuție atât posibilitățile tehnologice de miniaturizare, cât și provocările etice și de reglementare necesare pentru traducerea cercetării în aplicații clinice sigure.
Un microrobot care poate simți, gândi și se poate mișca
Dispozitivul nou nu este la scară nanometrică pură, dar, prin dimensiunile sub-milimetrice, este excepțional de mic: aproximativ comparabil cu — și în unele dimensiuni mai mic decât — un bob de sare de masă. Marc Miskin, profesor asistent de inginerie electrică și de sisteme la Penn și coautor al lucrării, l-a descris ca fiind „primul robot foarte mic care poate simți, gândi și acționa” prin integrarea calculului la bord, conversiei energiei și mișcării într-un singur pachet. Această formulare subliniază conceptul de autonomie locală la scară micro, o schimbare semnificativă față de abordările tradiționale de microrobotică.
Protrotipul este încă într-o fază experimentală și nu este autorizat pentru utilizare în interiorul corpului uman. David Blaauw, profesor la Universitatea din Michigan și coautor al studiului, a declarat pentru Washington Post că nu s-ar mira dacă aplicații practice ar apărea în decurs de un deceniu. Această aclamare prudentă reflectă atât potențialul tehnologic, cât și obstacolele majore care rămân de soluționat — de la alimentare și biocompatibilitate până la fabricație la scară și proceduri clinice de testare.
Cum funcționează și de ce contează
Istoric, microroboții au depins în mare măsură de sisteme de control externe — câmpuri magnetice la distanță, optică tethered sau electronice externe — ceea ce limita autonomia lor deoarece procesarea locală a datelor lipsea. Noutatea prezentă constă în autonomia locală la scară micro: robotul include un calculator foarte mic, senzori și un actuator, și folosește celule fotovoltaice miniaturizate pentru a colecta energie necesară atât pentru calcul, cât și pentru propulsie. Prin combinarea funcțiilor de senzare, logică și acționare într-un singur corp sub-milimetrul, cercetătorii schimbă compromisurile care, anterior, forțau microroboții să fie fie pasivi, fie strict controlați din exterior.
Materiale și proiectare
- Structură: construit din siliciu, cu straturi metalice ce includ platină și titan pentru electrozi și componente rezistente, alese pentru stabilitate electrică și mecanică la scara mică.
- Alimentare: celule solare miniaturizate convertesc lumina în electricitate pentru a alimenta procesorul integrat și sistemul de propulsie; această soluție oferă generare de energie locală, dar ridică probleme privind eficiența în medii întunecate sau adânc în organism.
- Senzori și logică: electronica compactă permite dispozitivului să detecteze parametri locali (de exemplu intensitatea luminii, orientarea sau obstacole apropiate) și să ia decizii simple fără control continuu din exterior, sprijinind autonomia operațională.
Lucrând la scară micronică (un milionime de metru), acești microroboți intră în același domeniu fizic ca multe unități biologice — celule, microvase sanguine și structuri tisulare — ceea ce îi face relevanți pentru aplicații biomedicale cum ar fi livrarea țintită a medicamentelor, repararea leziunilor microscopice ale țesuturilor, diagnosticul localizat sau inspecția regiunilor greu accesibile ale corpului. Scalabilitatea la acest nivel deschide scenarii în care intervențiile medicale pot fi efectuate cu o precizie mult mai mare decât instrumentele convenționale, reducând potențial efectele secundare sistemice.
Totuși, există provocări majore: cum să se alimenteze microroboții în medii interne cu lumină redusă, cum să se garanteze biocompatibilitatea materialelor și a straturilor metalice, cum să se producă aceste dispozitive la scară și costuri rezonabile și cum să se elaboreze strategii de control și recuperare sigure pentru utilizarea clinică. În plus, din punct de vedere fiziologic, mediile fluide și microcirculația impun constrângeri hidrodinamice specifice la scară mică, iar fenomene precum mișcarea browniană sau curentul sanguin pot influența puternic traiectoria unui microrobot.
Echipa de cercetare subliniază că acest prototip este un pas fundamental, nu un produs finit. Prin încorporarea senzării, calculului și actuației într-un singur dispozitiv sub-milimetru, lucrarea schimbă raportul de forțe între autonomie și dependența de sisteme externe, oferind un model pentru generațiile următoare de microroboți autonomi.
În anii următori, inginerii vor rafina captarea energiei, fidelitatea senzorilor și materialele pentru a trece de la demonstrații de laborator la sarcini relevante în lumea reală. De exemplu, îmbunătățiri ale eficienței celulelor fotovoltaice miniaturizate sau integrarea unor surse hibride de energie (cum ar fi microbaterii sau conversia energiei chimice locale) ar putea extinde semnificativ autonomia dispozitivelor. Dacă aceste eforturi reușesc, microroboții autonomi ar putea deveni o clasă nouă de instrumente medicale — mașini minuscule care navighează în corp, răspund la condițiile locale și livrează terapii acolo unde instrumentele convenționale nu pot ajunge.
Mai mult, pentru a transforma această cercetare într-o tehnologie clinică utilă sunt necesare programe de validare preclinică riguroase: teste în modele biologice relevante, evaluări ale toxicității şi interacțiunilor cu sistemul imunitar, dezvoltarea unor proceduri de izolare și sterilizare în procesele de fabricație, și crearea unor protocoale de retragere sau neutralizare a dispozitivelor în caz de eșec. Speranța cercetătorilor este că prin colaborări interdisciplinare între inginerie, biomedicină, reglementare și etică se pot parcurge aceste etape într-un mod responsabil.
Din perspectiva științifică, microroboții autonomi integrează concepte din microelectronică, MEMS (sisteme microelectromecanice), inginerie a materialelor, fotovoltaică și control distribuționat. Realizarea unui calculator funcțional la această scară implică optimizări ale arhitecturii logice, minimizarea consumului energetic al circuitelor și proiectarea unor strategiifuncționale simple, dar robuste, pentru a putea lua decizii în prezența zgomotului și a variațiilor de mediu. Pe partea de propulsie, soluțiile pot include actuatori electrochimici, structuri care schimbă forma în răspuns la electricitate sau temperatură, și mecanisme inspirate din microbiologie pentru a manevra în fluide vâscoase la scară mică.
Pe măsură ce cercetarea avansează, vor apărea și întrebări legate de reglementare și acceptare socială: când devine sigură și etic justificabilă introducerea unor roboți în corpul uman? Ce standarde de testare trebuie adoptate pentru a garanta că dispozitivele nu provoacă daune pe termen lung? Cum se vor aborda problemele de confidențialitate și securitate când dispozitive mici, autonome, pot colecta date biologice sensibile? Răspunsurile la aceste întrebări vor necesita discuții transparente între oameni de știință, clinicieni, factorii de decizie și public.
În plus față de aplicațiile strict medicale, microroboții autonomi deschid perspective pentru cercetare fundamentală: sondarea microambientelor biologice în timp real, studii detaliate despre interacțiunile dintre celule și microstructuri, și noi instrumente pentru ingineria tisulară. Capacitatea de a efectua diagnostice locale cu rezoluție micro ar putea transforma abordările preventive și terapeutice, permițând intervenții mult mai precise și mai puțin invazive.
În concluzie, dezvoltarea unui microrobot sub-milimetru care combină senzare locală, calcul la bord și propulsie alimentată cu energie fotovoltaică marchează un avans tehnologic important în domeniul microroboticii și al dispozitivelor medicale miniaturizate. Deși tranziția către aplicații clinice implică numeroase etape, de la teste de biocompatibilitate la optimizarea energetică și la aprobări regulatorii, direcția este clară: integrarea autonomiei la scară micro poate genera instrumente medicale noi, capabile să ofere diagnostice și tratamente extrem de localizate, cu impact semnificativ asupra modului în care abordăm afecțiuni complexe.
Sursa: smarti
Lasă un Comentariu