
10 Minute
Cercetătorii au demonstrat că undele sonore pot fi folosite pentru a coordona flote de roboți minusculi care se comportă ca ansambluri vii: ei se mișcă în sincronie, își adaptează forma pentru a traversa spații înguste și chiar se pot reface după deteriorări. Descoperirea — condusă de o echipă de la Penn State și publicată în Physical Review X — deschide noi direcții pentru microrobotică în medicină, curățarea mediului și multe alte domenii.
Un studiu nou, condus de cercetători de la Penn State, arată pentru prima dată cum undele sonore ar putea funcționa ca un mijloc de control pentru roboți de dimensiuni microscopice.
De ce semnalele acustice sunt importante pentru roboții în roi
Grupurile biologice — de la lilieci care folosesc ecolocația până la insecte care se adună în roiuri — se bazează frecvent pe sunet pentru a naviga și a se coordona. Inspirată de astfel de mecanisme naturale, echipa de cercetare a construit modele de microroboți care emit și detectează semnale acustice pentru a-și menține coeziunea și pentru a se orienta ca un colectiv. Comunicarea acustică se evidențiază deoarece sunetul se propagă rapid și suferă relativ puțină atenuare în comparație cu indici chimici, oferind astfel un canal eficient pentru coordonare în rândul unor dispozitive distribuite și simple.
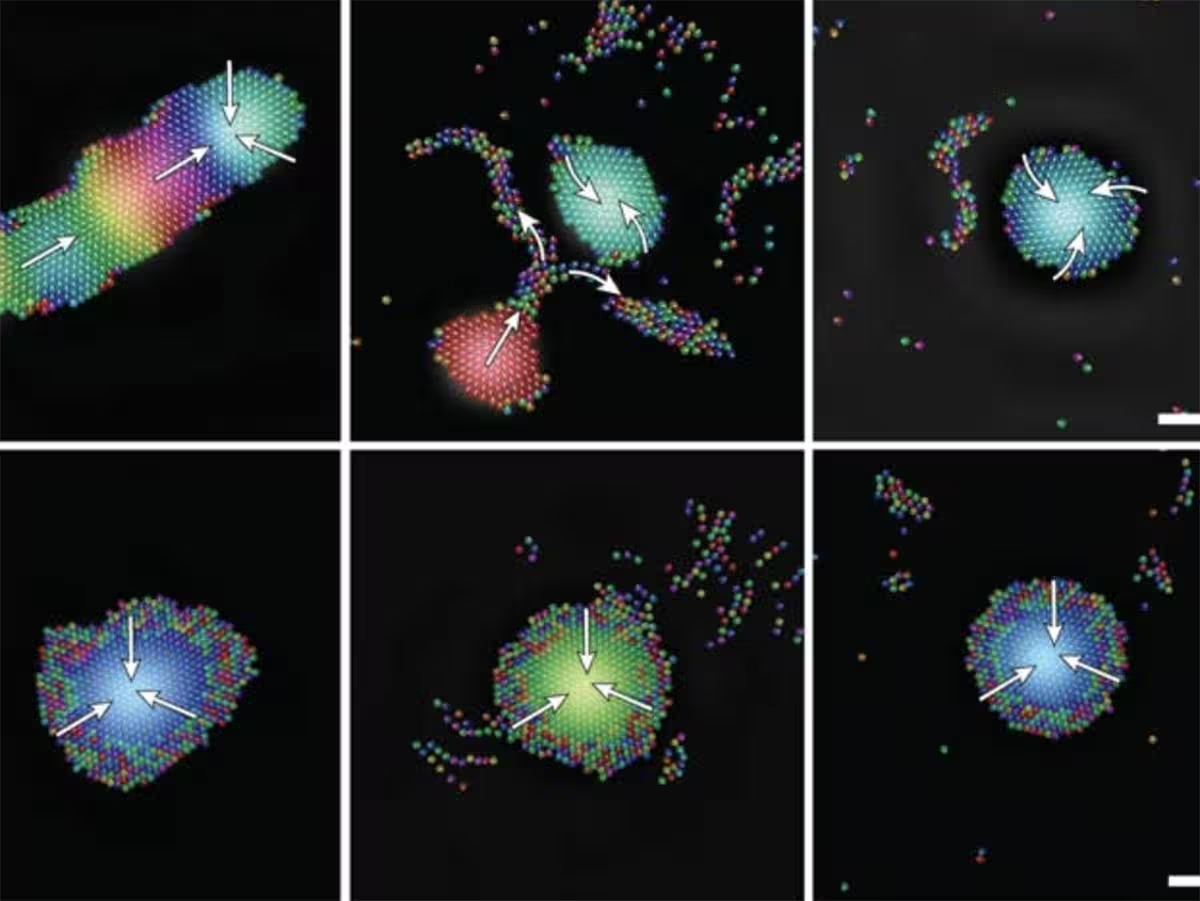
În simulările realizate la Penn State, fiecare agent avea un profil hardware minim: un mecanism de propulsie pentru mișcare, un microfon și un difuzor foarte mici pentru schimb de semnale sonore și un oscilator intern care ajustează mișcarea în raport cu câmpul acustic local. În ciuda acestei simplități, ansamblul a generat comportamente emergente complexe — modificări de formă, convergență către sursele sonore puternice și reconstituire după perturbări — aptitudini care, în mod normal, sunt asociate unor sisteme de control mult mai sofisticate. Aceste rezultate sugerează că sincronizarea acustică și feedback-ul local pot înlocui parțial tratamentele tradiționale bazate pe procesare intensă sau comunicare digitală complexă.
How the simulation worked: a peek under the hood
Echipa a folosit un model computațional bazat pe agenți pentru a urmări mii de unități autopropulsate foarte mici. Fiecare microrobot simulat emitea un semnal acustic periodic și măsura câmpul acustic local creat de vecini. Prin sincronizarea oscilatorului intern la frecvența locală dominantă și deplasarea către sursa acustică cea mai puternică, agregatul unor unități foarte simple s-a autoorganizat în roiuri coerente.
Pentru că modelul operează pe principii fizice generale mai degrabă decât pe un cod proprietar strict, cercetătorii susțin că implementările experimentale cu proprietăți acustice și mecanice similare ar trebui să reproducă fenomenele de bază. Pe scurt: inteligența colectivă a apărut din elemente de bază modeste — fără un controler centralizat, fără o hartă detaliată a mediului, doar feedback local bazat pe sunet. Această proprietate face din comunicarea acustică o abordare atractivă pentru proiectarea roboților colaborativi la scară mică, deoarece multe dintre componentele necesare (piezo-transductoare simple, micro-difuzoare și micro-microfoane MEMS) pot fi fabricate cu costuri și consum energetic scăzut.
Potential missions: from inside the body to contaminated rivers
Ceea ce face acești microroboți ghidați de sunet deosebit de convingători este adaptabilitatea lor. În simulări, roiurile au șeruit prin coridoare înguste, s-au regrupat când au fost separate și și-au păstrat funcționalitatea după pierderea parțială a unor unități. Acest tip de reziliență poate transforma modul în care abordăm numeroase aplicații practice, inclusiv următoarele domenii emergente:
- Livrare țintită de medicamente: flote de microroboți ar putea naviga în canale vasculare pentru a concentra medicația la țesuturi specifice, o abordare valoroasă în terapia oncologică localizată, administrarea de agenți biologici sau pentru tratamente minim invazive care evită afectarea zonelor sănătoase. Comunicarea acustică poate permite sincronizarea eliberării medicamentului și navigarea în jurul obstacolelor biologice.
- Remediere ambientală: microroboți dispersați ar putea localiza și neutraliza poluanți în terenuri complexe, cum ar fi straturile de sedimente, rețelele subterane sau conducte blocate, contribuind la evaluare și curățare în situri ecologice sensibile. Comunicația acustică și sincronizarea pot facilita cooperarea în medii turbid sau cu curenți, unde metodele optice sau radio sunt limitate.
- Căutare, salvare și inspecție: roiurile acustice mici pot explora structuri prăbușite sau spații industriale strâmte unde intervenția umană sau a roboților mai mari este imposibilă. Abilitatea de a se reconfigura și de a menține funcționalitatea după avarii parcă le apropie de funcțiile eco-robotice necesare în misiuni de urgență.
Pe lângă aceste exemple, potențialul pentru monitorizare ecologică, detectare de contaminanți biologici și operațiuni de reparații la scară mică subliniază relevanța comunicării acustice pentru roboți micrometrici. Terminologia importantă din domeniu include: microroboți, roboți micrometrici, comunicare acustică, sincronizare, reconfigurare dinamică și materie activă.
Scientific context: active matter and emergent intelligence
Rezultatele se încadrează într-un domeniu în dezvoltare denumit „materie activă” (active matter), care studiază modul în care multe unități autoconduse — fie celule, bacterii, fie particule sintetice — generează tipare și funcții la scară largă. Istoric, cercetătorii s-au bazat pe semnale chimice pentru a programa interacțiunile în materie activă. Demonstrând controlul acustic, studiul extinde trusa de instrumente: sunetul se propagă mai departe și mai rapid decât majoritatea semnalelor chimice locale, iar hardware-ul acustic poate fi extrem de simplu și eficient din punct de vedere energetic la dimensiuni mici.
Conform declarației liderului studiului, Igor Aronson, această abordare ar putea genera microroboți care sunt atât mai inteligenți, cât și mai robusti, menținând în același timp o complexitate internă minimă. În loc să echipeze fiecare unitate cu procesoare și senzori multipli, proiectanții pot exploata fenomene fizice — câmpuri acustice și sincronizare — pentru a obține comportamente coordonate la scară mare. Acest principiu al externalizării „inteligenței” către dinamicile mediului reprezintă o schimbare de paradigmă în ingineria roboților colaborativi.
Mai mult, integrarea conceptelor din fizică (propagare acustică, interferență, atenuare), din control distribuit (algoritmi locali, sincronizare de fază) și din știința materialelor (transductoare, actuatoare flexibile) creează un context interdisciplinar solid. Termeni cheie pentru cercetători și dezvoltatori includ sincronizare acustică, rețele distribuite de senzori, bucle locale de feedback și materie activă sintetică.
Challenges before real-world devices
Traducerea de la simulare la dispozitive de laborator și de teren necesită rezolvarea unor probleme practice importante: proiectarea emițătoarelor și microfoanelor care funcționează fiabil la scale micro, asigurarea unor nivele acustice sigure pentru țesuturi biologice, și dezvoltarea de materiale și metode de propulsie care operează eficient în medii în care există gradienti chimici sau curenți turbulenți. De asemenea, este esențială abordarea controlului în medii eterogene și prevenirea interferențelor nedorite între multiple roiuri care operează în proximitate.
Producerea de transductoare piezoelectrice la scară mică, micro-EMC pentru filtrare și procesare semnificativă a semnalului cu consum redus de energie sunt direcții tehnologice critice. În plus, siguranța biologică impune standarde: propagarea undelor acustice în corpul uman poate induce încălzire locală sau efecte mecanice; astfel, limitele de expunere și metodele de control adaptive trebuie definite înainte de aplicații medicale. Pentru medii fluide sau sedimentare, proiectanții trebuie să optimizeze raportul între forța de propulsie generată de micro-actuatoare și rezistența fluidului, iar sistemele energetice trebuie să asigure autonomie adecvată pentru misiuni reale.
Din punct de vedere al arhitecturii de sistem, provocările includ dezvoltarea de protocoale acustice robuste pentru identificare și localizare, prevenirea coliziunilor în roi și implementarea unor strategii de auto-reparare sau redundanță în caz de eșec parțial. În plus, interoperabilitatea cu alte tehnologii (de ex. microfluidică, detectoare chimice integrate) va extinde utilitatea acestor microroboți în aplicații industriale și de mediu.
Expert Insight
Dr. Maya Patel, inginer robotic specializat în sisteme de roi, remarcă: "Eleganța reală a coordonării acustice constă în simplitate. Nu ai nevoie de calcul intens pe fiecare nod — doar cuplajul potrivit între emisie, detecție și mișcare. Totuși, realizarea transductoarelor foarte mici, durabile și eficiente din punct de vedere energetic este următoarea mare provocare. Dacă rezolvăm asta, spectrul de aplicații — de la terapii țintite la monitorizare mediului — devine uriaș."
Comentariile experților subliniază faptul că progresul tehnologic în domeniul microfabricării, nanomaterialelor și electronicii ultra-compacte va determina viteza la care aceste concepte trec din laborator în prototipuri funcționale. De asemenea, colaborările cu medici, ecologiști și autorități de reglementare vor fi esențiale pentru adoptarea în siguranță a tehnologiilor acustice în aplicații sensibile.
What comes next
Munca viitoare va combina probabil experimente cu componente acustice progresiv mai mici și modele de mediu tot mai realiste. Echipele interdisciplinare — reunind fizicieni, ingineri, biologici și oameni de știința materialelor — sunt necesare pentru a construi prototipuri și a testa performanța în scenarii relevante. Dacă roiurile acustice pot fi realizate fizic astfel cum apar în simulări, ele ar putea reprezenta o cale practică, cu complexitate scăzută, către microroboți inteligenți care acționează colectiv pentru a rezolva sarcini dincolo de capacitatea unui singur dispozitiv.
Pe lângă validarea experimentală, lucrările viitoare ar trebui să exploreze metode de control hibride (combinând semnale acustice cu indicii magnetice sau chimice), strategiile de securitate pentru comunicații acustice și procedurile etice pentru utilizarea în medii biologice sau populare. De asemenea, standardele de interoperabilitate și protocoalele comune pentru „roiuri acustice” vor facilita scalarea și integrarea comercială a acestor tehnologii.
În concluzie, controlul bazat pe undele sonore oferă o abordare promițătoare pentru dezvoltarea de microroboți colaborativi: oferă propagare eficientă a semnalului, hardware potențial simplu și oportunitatea de a exploata fenomene fizice pentru coordonare la scară. Prin rezolvarea provocărilor de inginerie și etică, roboții micrometrici coordonați acustic pot deveni instrumente esențiale pentru medicină, curățarea mediului, inspecții industriale și multe alte misiuni care astăzi par greu de realizat.
Sursa: scitechdaily
Lasă un Comentariu