10 Minute
Ingineri de la University of Pennsylvania și University of Michigan au construit un microrobot aproape invizibil, complet programabil, care poate detecta, calcula și se poate deplasa singur atunci când este scufundat într-un fluid. Nu este mai mare decât un bob de sare: dispozitivul — suficient de mic pentru a se echilibra pe creasta unei amprente — reprezintă o reducere dramatică față de platformele robotice autonome anterioare și deschide noi posibilități pentru robotică la scară micrometrică și nanorobotică aplicată. Proiectul combină microelectronică, optică, materiale avansate și mecanică a fluidelor, extinzând potențialul pentru aplicații practice în monitorizarea mediului, diagnosticare biomedicală și inspecție de microstructuri.
Cât de mic este «mic» și de ce contează
Noul microrobot măsoară aproximativ 200 pe 300 micrometri în plan și are doar 50 micrometri grosime. Pentru o perspectivă: este mai mic decât o neg sau un punct de pe piele și se poate așeza pe o monedă fără a acoperi data înscrisă pe aceasta. Dacă clipești, îl poți pierde.
Dimensiunea contează la scara micrometrică deoarece regulile fizice care guvernează mișcarea se schimbă substanțial. Forțele gravitaționale și inerția — dominante la scară umană — devin neglijabile, în timp ce forțele viscoase și rezistența fluidă (drag) preiau rolul principal. La numere Reynolds foarte mici, mișcarea este limitată de vâscozitate, iar strategii de propulsie bazate pe inerție nu mai funcționează eficient. După cum explică Marc Miskin, inginer în nanorobotică la University of Pennsylvania: când ești suficient de mic, împingerea apei seamănă cu împinsul prin smoală. Depășirea acestor provocări impuse de mediul fluid a necesitat regândirea completă a propulsiei, controlului și capacităților de calcul pentru dispozitive microscopice.
Ce conține un robot de dimensiunea unui bob de sare
În ciuda volumului extrem de mic, platforma integrează un procesor, memorie, senzori, receptoare optice și o sursă de energie. Echipa a echipat fiecare microrobot cu celule solare minuscule care recuperează aproximativ 100 nanowați de energie din iluminarea cu LED — suficient pentru a susține senzori de bază, luarea deciziilor elementare și acțiuni motrice simple. Gestionarea atentă a energiei, prin arhitecturi de putere ultra-scăzută și strategii de activare intermitentă, face posibilă funcționarea continuă la nivele energetice foarte reduse.
Robotul poate măsura temperatura fluidului din jur și poate comunica aceste măsurători prin mișcări modelate, un comportament comparat cu dansurile agitate ale albinelor pentru transmiterea informației. Comunicarea prin mișcare și sincronizarea grupurilor permit roboteilor să facă schimb de informații și să coopereze în rezolvarea unor sarcini simple, fără a depinde exclusiv de transmisii radio care ar fi ineficiente la acea scară.
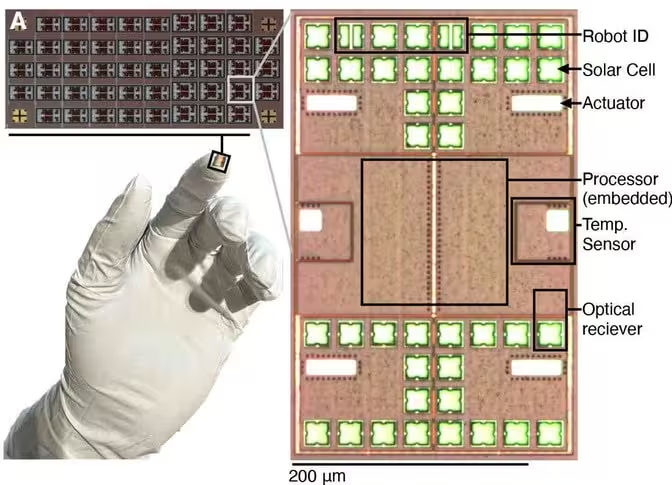
Microboți fabricați într-o foaie (stânga sus) cu o suprafață aproximativ egală cu cea a unei amprente (stânga jos). Fiecare robot conține celule solare, receptoare optice, doi senzori de temperatură, un procesor pentru preluarea informațiilor și luarea deciziilor, patru panouri actuatoare care generează mișcarea și patru receptoare care permit robotului să identifice programe primite prin semnale luminoase.
Propulsie fără membre mobile
La această scară, locomotia tradițională bazată pe membre mici sau vâsle devine fragilă și, în practică, impracticabilă. În loc de componente mecanice expuse, echipa de la Penn a creat o metodă de propulsie fără părți mobile externe. Microrobotul generează în jurul corpului un câmp electric care pune în mișcare curenți moleculari în fluidul înconjurător, adică folosește fenomene electrocinetice pentru a modifica local câmpul de curgere. Practic, dispozitivul nu doar plutește în flux; el modelează fluxul din jurul său ca să se miște — un principiu similar acțiunii unui motor care alterează condițiile din mediul apropiat.
Aceste tipuri de propulsie electrokinetică pot include efecte precum electroosmosea induse sau curenți generați prin variații locale de potențial, care la scară micrometrică se dovedesc eficiente comparativ cu solutții mecanice. Avantajele includ rezistență mecanică crescută, fiabilitate în medii corozive și posibilitatea de a regla viteza și direcția prin control electric fin, toate elemente esențiale pentru robotica microscală.
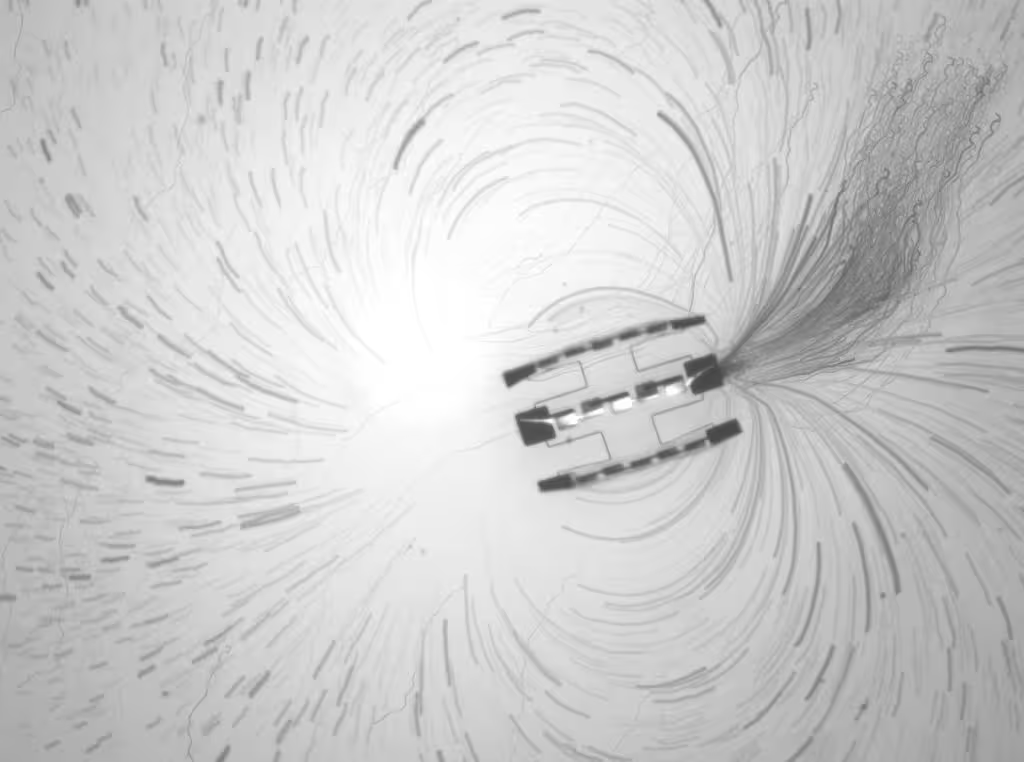
Time-lapse proiectat al traiectoriilor particulelor-tracer în proximitatea unui robot format din trei motoare legate între ele. (Lucas Hanson & William Reinhardt/University of Pennsylvania)
Calcul microscopic: regândirea procesoarelor și a codului
Integrarea unui calculator funcțional într-un pachet atât de mic a impus regândirea completă a modului de proiectare a circuitelor și a programelor. Cercetătorii de la University of Michigan au dezvoltat o arhitectură de calculator microscopică care folosește putere și memorie minimale, special adaptată constrângerilor hardware ale microroboților. David Blaauw, om de știință în domeniul calculatoarelor implicat în proiect, subliniază că echipa a redesenat atât hardware-ul, cât și software-ul pentru a se încadra în limitările de energie și dimensiune.
Memoria la bord fiind limitată în prezent, microrobotul rulează programe simple, executate local; acestea pot fi finite-state machines sau algoritmi evenimentiali cu consum redus. Comportamentele de bază — detectare, decizii simple și mișcare — sunt suficiente pentru autonomie în sarcini elementare. Platforma include, de asemenea, receptoare optice care permit roboților să accepte programe noi transmise prin semnale luminoase, facilitând reprogramarea de la distanță sau coordonarea în turmă. Această reprogramare optică reduce necesitatea conectivității electronice complexe și oferă o cale practică pentru actualizări și sincronizări rapide în medii controlate.
Pe plan software, modelele de programare adoptate pun accent pe economicitatea energetică: cod compact, utilizare judicioasă a memoriei, protocoale simple de comunicare între roboți și tactici de activare/dezactivare pentru a conserva energie. La nivel de hardware, soluțiile includ circuite analog-digital hibride, comutare rapidă a stărilor și tehnici de stocare volatile minimale combinate cu memorii non-volatile reduse ca dimensiune.
Comportament colectiv și autonomie
Izolat, fiecare dispozitiv este relativ rudimentar. Împreună, însă, roboții pot sincroniza acțiunile și forma grupuri coordonate care se comportă similar cardurilor de pești sau roiurilor — fenomene emergente utile pentru acoperirea spațiilor și distribuirea sarcinilor. Cercetătorii au demonstrat că roiuri de microroboți pot funcționa autonom timp de luni, dacă sunt reîncărcate periodic prin iluminare cu LED. Strategiile operative includ cicluri de activare pentru conservarea energiei, în care roboții trec în stări de repaus și se reactivează doar la lumină sau la semnale specifice pentru a efectua misiuni.
Implicarea colectivă deschide aplicații variate: microroboți de lungă durată pot realiza monitorizare ambientală distribuită, inspecții în rețele microfluidice sau chiar cooperare în sarcini de microasamblare. Modele de control de tip consens, algoritmi inspirati biologic (de ex. stigmergia) și protocoale simple de comunicare optică permit coordonare scalabilă fără infrastructură complexă de comunicații.
Context științific și aplicații potențiale
Microroboții programabili autonomi anterior erau de ordinul milimetrului — o realizare tehnică notabilă obținută de peste două decenii. Reducerea funcționalității cu aproximativ 10.000 de ori a implicat inovații care traversează optic, microelectronică, mecanica fluidelor și știința materialelor. Progresul a venit din convergența mai multor discipline: optimizarea colectoarelor de lumină la scara micrometrică, depozitarea și procesarea semnalelor la consum redus, precum și proiectarea interfețelor materiale cu fluidele pentru stabilitate și biocompatibilitate.
- Monitorizare biomedicală: Cu miniaturizare suplimentară și ambalare biocompatibilă, microroboții ar putea într-o zi patrula țesuturi sau fluide biologice pentru detectarea timpurie a infecțiilor, inflamațiilor sau dezechilibrelor fiziologice. Implementările medicale cer studii riguroase de siguranță, biodegradabilitate și compatibilitate imună.
- Detectare și monitorizare ambientală: Roiuri de microroboți pot cartografia treptat gradientele chimice sau termice în micromedii, cum ar fi porii din sol, conductele microfluidice sau zonele cu contaminare chimică. Capacitatea de a opera colectiv face posibilă acoperirea spațiilor vaste la scară micrometrică și obținerea de date spațio-temporale detaliate.
- Microasamblare și inspecție: Dispozitivele programabile mici ar putea inspecta sau manipula structuri microfabricate inaccesibile instrumentelor convenționale, contribuind la controlul calității în microelectronică, MEMS și biotehnologie. Abilitățile lor de coordonare pot facilita operații de asamblare distribuită sau reparații locale la nivel de microcomponentă.
Perspective ale experților
«Aceasta este, cu adevărat, doar prima parte a poveștii», spune Marc Miskin. «Am demonstrat că poți integra un creier, un senzor și un motor într-un obiect aproape imposibil de observat, și să-l faci să supraviețuiască și să funcționeze luni de zile».
Adăugând perspectivă, un comentariu realist, dar fictiv, al unui expert ajută la conturarea impactului mai larg:
Dr. Elena Ruiz, ingineră în microsisteme
«Ceea ce face această lucrare încântătoare este abordarea la nivel de sistem. Rezolvarea simultană a propulsiei, sursei de energie și calculului — în loc de tratarea fiecărei componente separat — eliberează capabilități pe care anterior nu le consideram fezabile la această scară. În următorul deceniu, îmbunătățiri iterative ale memoriei, ale captării energiei și ale materialelor ar putea transforma aceste dispozitive din curiozități de laborator în instrumente utile pentru medicină și științele mediului.»
Studiul care detaliază microrobotul a fost publicat în Science Robotics, iar echipa explorează în continuare modalități de extindere a memoriei la bord și adăugare a unor comportamente mai elaborate. Din pași mici de hardware pot rezulta posibilități la scară mare: rețele de microroboți autonome care detectează, calculează și acționează în interiorul mediilor fluide pot remodela domenii precum diagnosticul, monitorizarea mediului și intervențiile microchirurgicale.
Pe lângă oportunități, există și provocări transversale: reglementările privind utilizarea dispozitivelor în medii biologice, cerințele pentru biocompatibilitate și degradare controlată, precum și considerente etice legate de aplicare și securitate. Dezvoltarea viitoare va trebui să echilibreze performanța tehnică cu evaluările de risc, protocoalele de monitorizare și strategiile de reciclare sau eliminare. În paralel, extensia capabilităților de reprogramare optică, îmbunătățirea eficienței captării energetică și optimizarea algoritmilor pentru comportament colectiv vor fi direcții centrale pentru tranziția acestor sisteme din laborator în aplicații reale.
Sursa: sciencealert
Lasă un Comentariu